Selected Papers
|
|
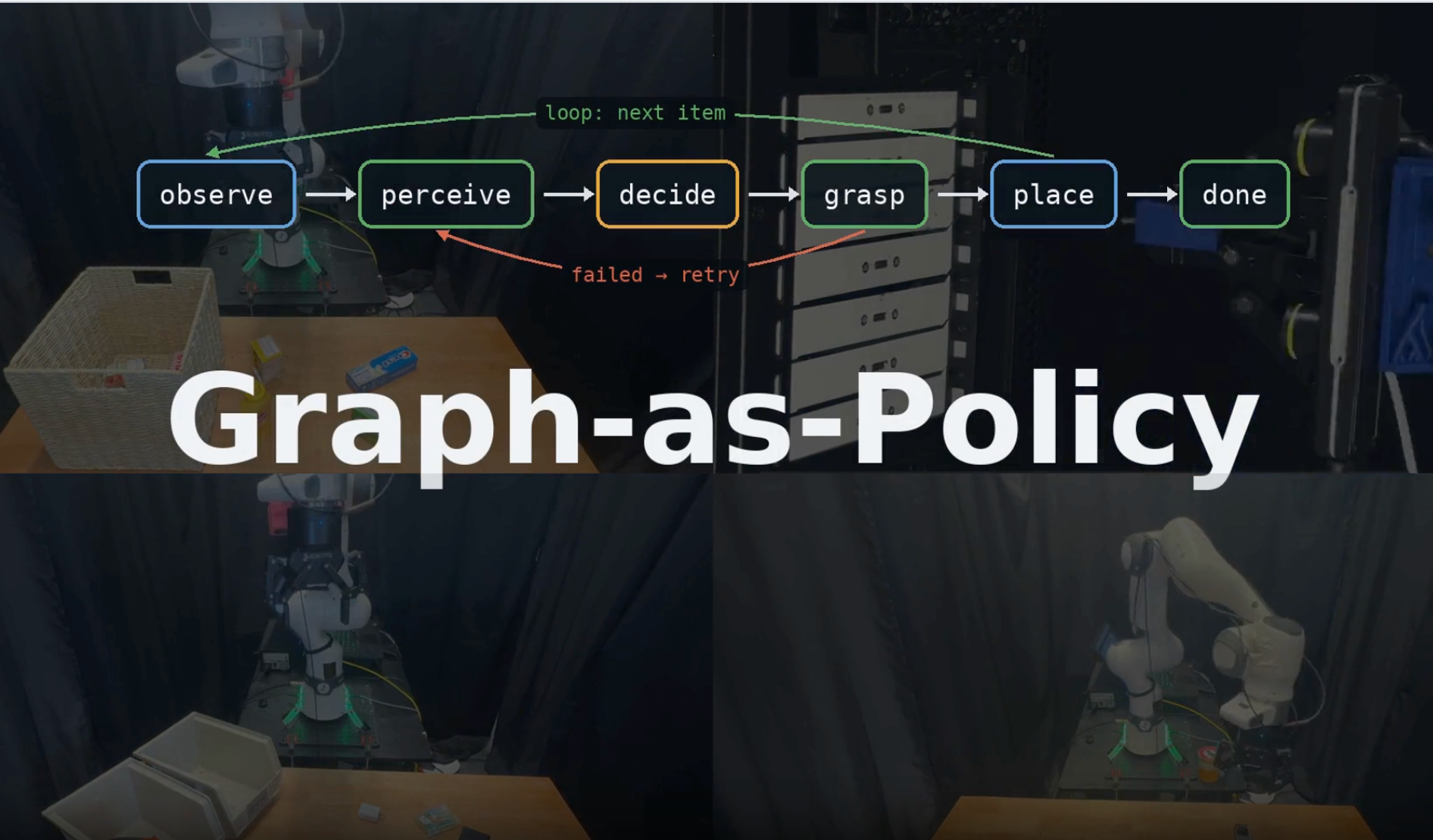
GaP: A Graph-as-Policy Multi-Agent Self-Learning Harness For Variational Automation Tasks
K. Chen, S. Xie, L. Fu, J. Yu, W. Pacini, S. Bajamahal, H. Kim, J. Drake, D. Kim, H. Xue, J. Francis, C. Juette, P. Schaldenbrand, M. Y. Seker, R. Wickramarachchi, U. Yoo, G. Wang, A. Murali, B. Sundaralingam, S. S. Sastry, S. Huang, Y. Zhu, L. Fan, K. Goldberg
arXiv, 2026
paper
website
|
|
|
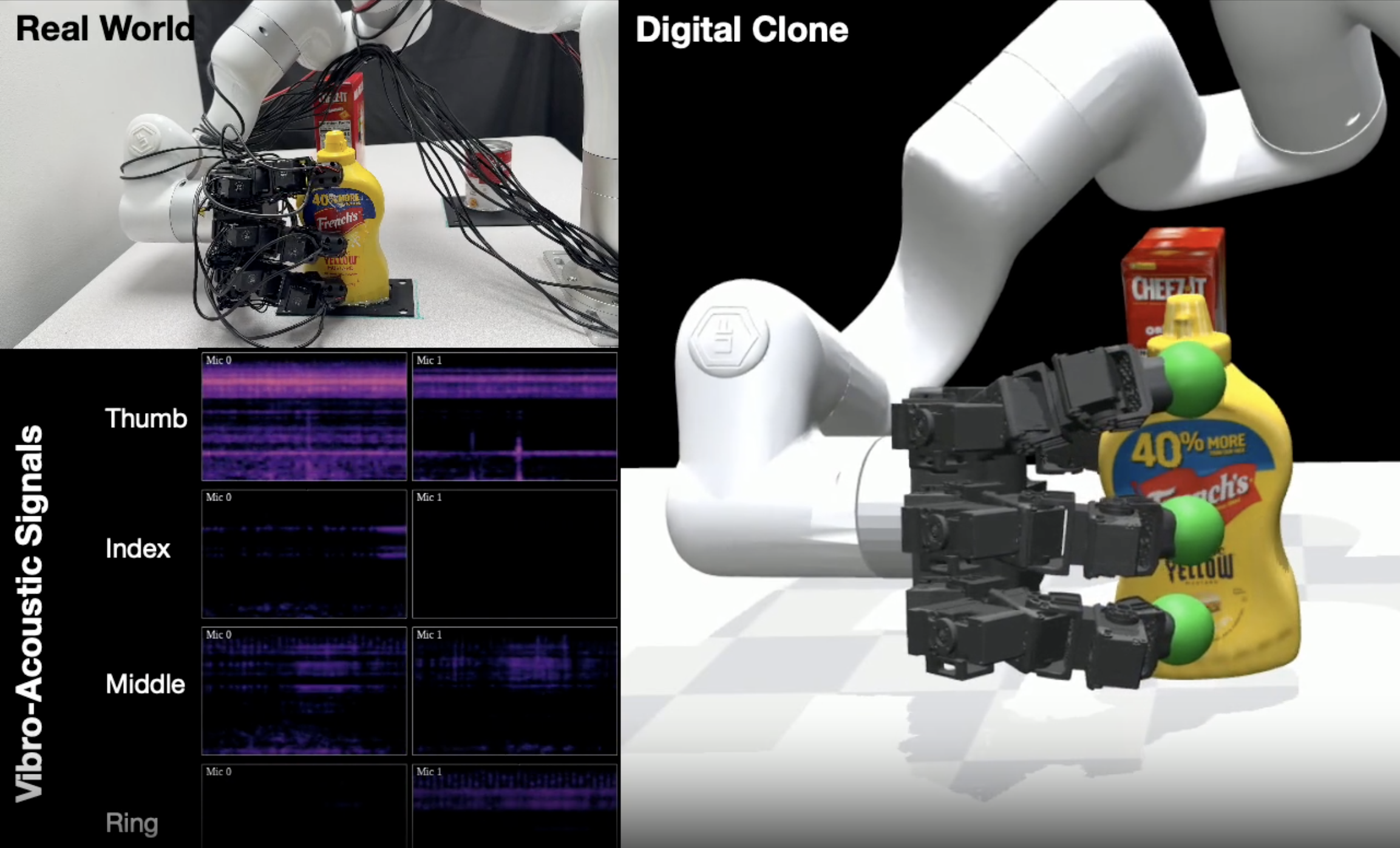
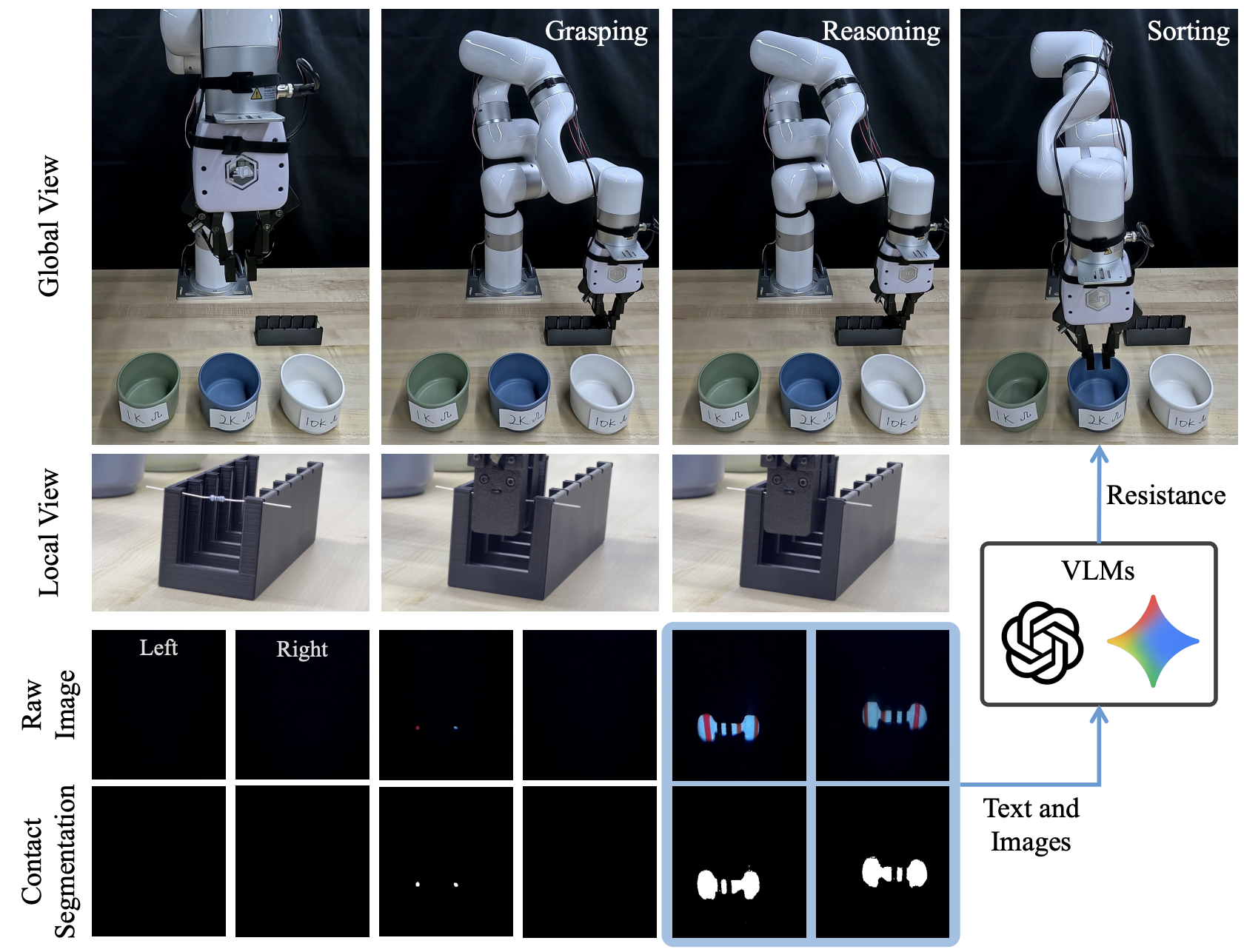
VibeAct: Vibration to Actions for Contact-Rich Reactive Robot Dexterity
Y. Mao*, U. Yoo*, J. Oh, J. Francis, J. Ichnowski
arXiv, 2026
paper
website
|
|
|
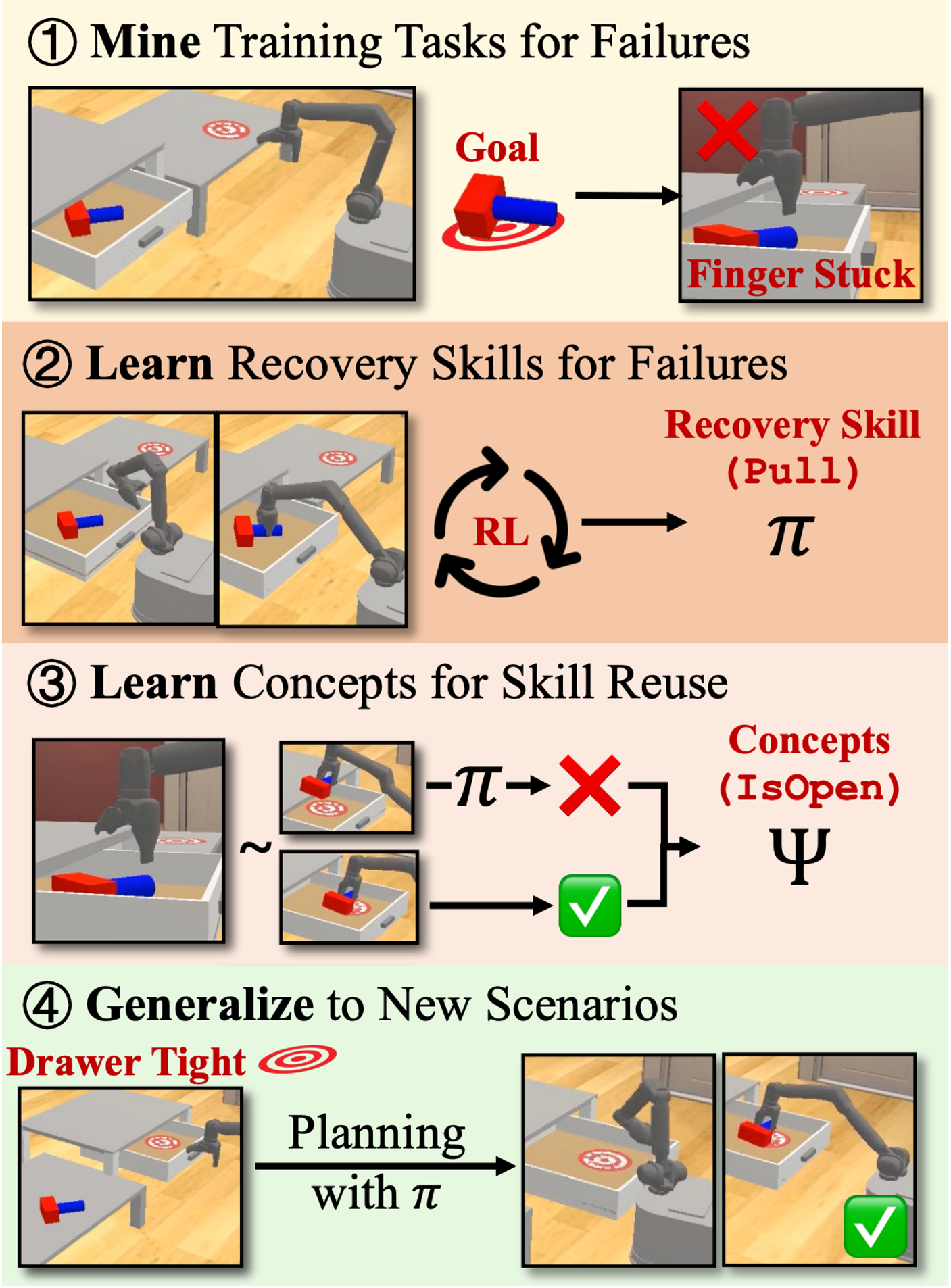
Recover, Discover, Plan: Learning Skills and Concepts from Robot Failures
B. Li, M. Mishra, Y. I. Liu, S. Tao, N. Kumar, A. Gray, R. Wickramarachchi, J. Francis, S. Scherer, T. Silver
arXiv, 2026
paper
website
|
|
|
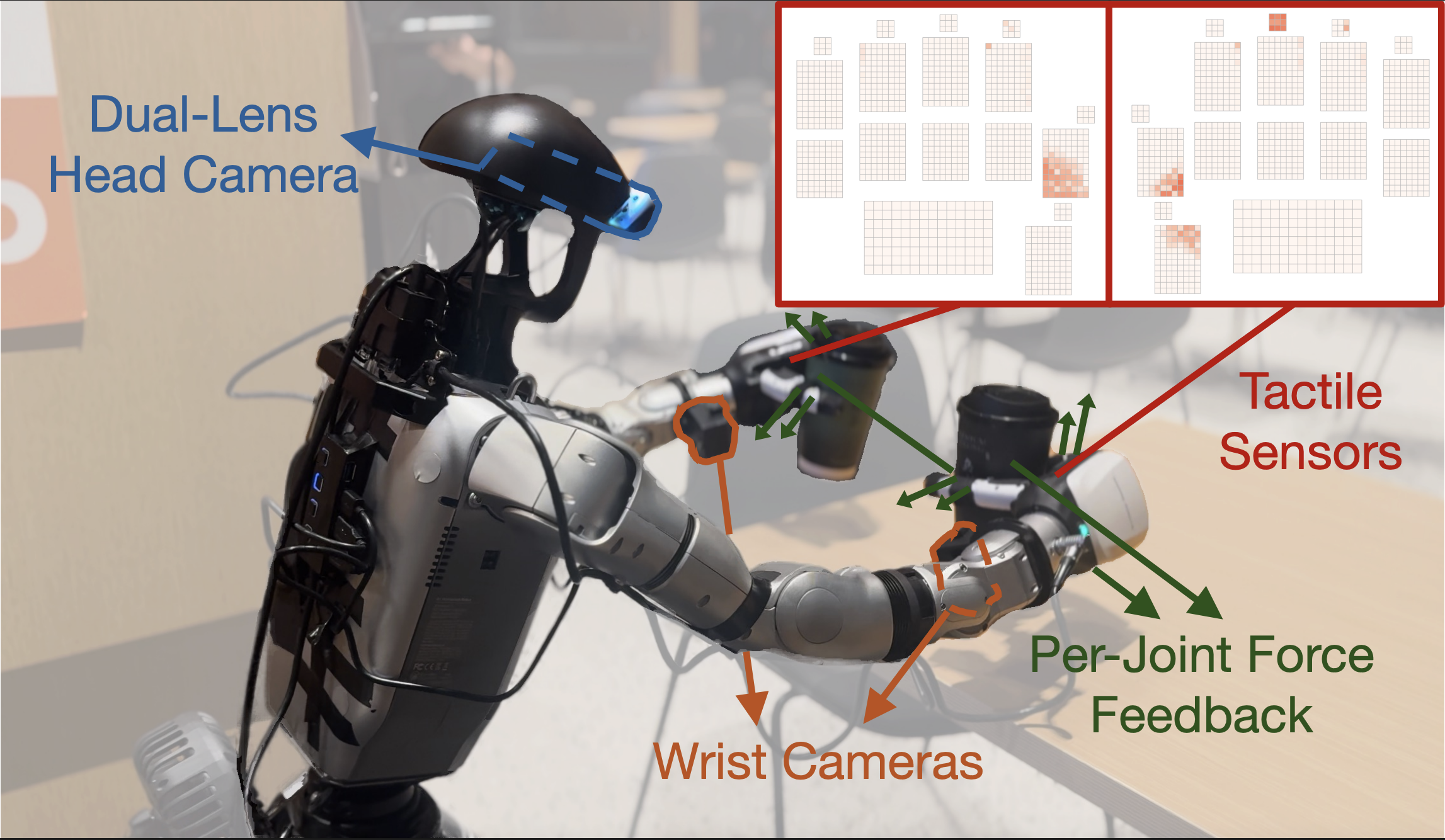
Learning Versatile Humanoid Manipulation with Touch Dreaming
Y. Niu, Z. Fang, B. Chen, S. Zhou, R. Senthilkumaran, H. Zhang, B. Chen, C. Qiu, H. E. Tseng, J. Francis, D. Zhao
To appear: 39th IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2026)
paper
website
|
|
|
SOFTMAP: Sim2Real Soft Robot Forward Modeling via Topological Mesh Alignment and Physics Prior
Z. Ma, U. Yoo, J. Francis, W. Zhi, J. Ichnowski, J. Oh
To appear: 39th IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2026)
paper
website
|
|
|
APEX: Learning Adaptive High-Platform Traversal for Humanoid Robots
Y. Wang*, T. Leng*, C. Lin*, S. Liu, S. Simon, B. Chen, J. Francis, D. Zhao
To appear: 39th IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2026)
paper
website
|
|
|
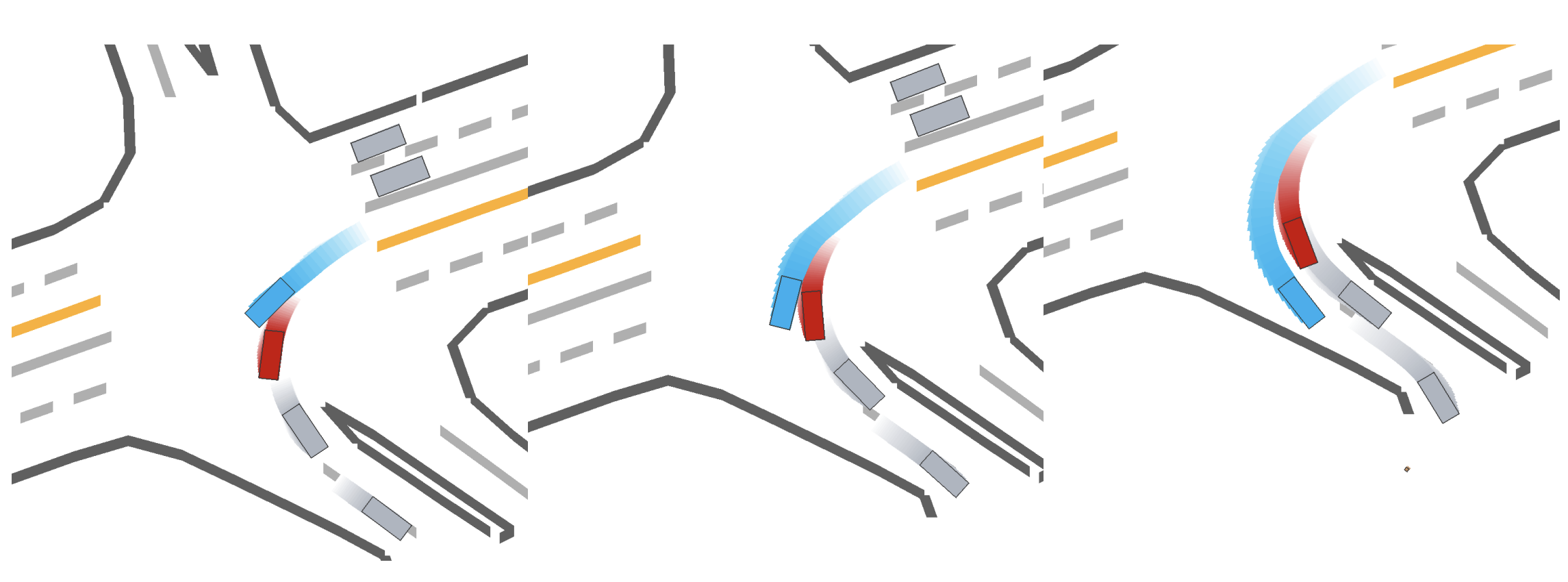
RCG: Safety-Critical Scenario Generation for Robust Autonomous Driving via Real-World Crash Grounding
B. Stoler, J. Yang, J. Francis, J. Oh
To appear: 39th IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2026)
paper
|
|
|
RIO: Flexible Real-time Robot I/O for Cross-Embodiment Robot Learning
P. A. Ortega-Kral*, E. Xing*, A. Bucker, V. Luk, J. Kim, O. Kwon, A. Xie, N. Sobanbabu, Y. Yuan, M. Lee, D. Ameria, B. Ayapilla, J. Bussell, G. Shi, J. Francis, J. Oh
To appear: 22nd Robotics: Science and Systems (RSS 2026)
paper
website
|
|
|
LightTact: A Visual-Tactile Fingertip Sensor for Deformation-Independent Contact Sensing
C Lin, B Huo, M Yu, E Ruppel, B Chen, J Francis, D Zhao
To appear: 22nd Robotics: Science and Systems (RSS 2026)
paper
website
|
|
|
GRAPPA: Generalizing and Adapting Robot Policies via Online Agentic Guidance
A. Bucker, P. Ortega-Kral, J. Francis, J. Oh
IEEE Robotics and Automation Letters (RA-L, 2026) —> IROS 2026 + RSS SemRob 2025
paper
website
|
|
|
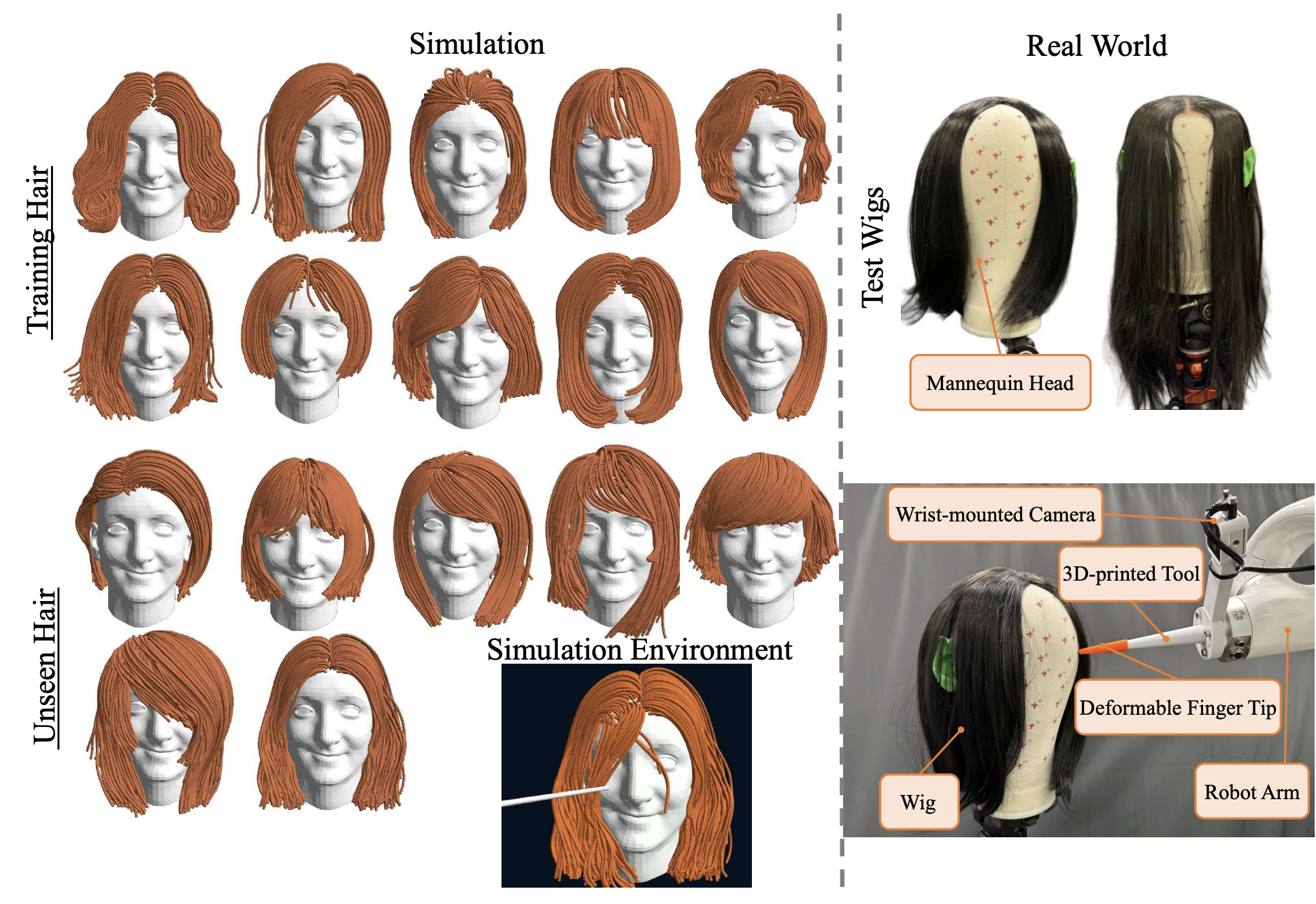
DYMO-Hair: Generalizable Volumetric Dynamics Modeling for Robot Hair Manipulation
C Zhao, U Yoo, AN Chaudhury, G Nam, J Francis, J Ichnowski, J Oh
43rd IEEE International Conference on Robotics & Automation (ICRA 2026) [Oral]
paper
website
|
|
|
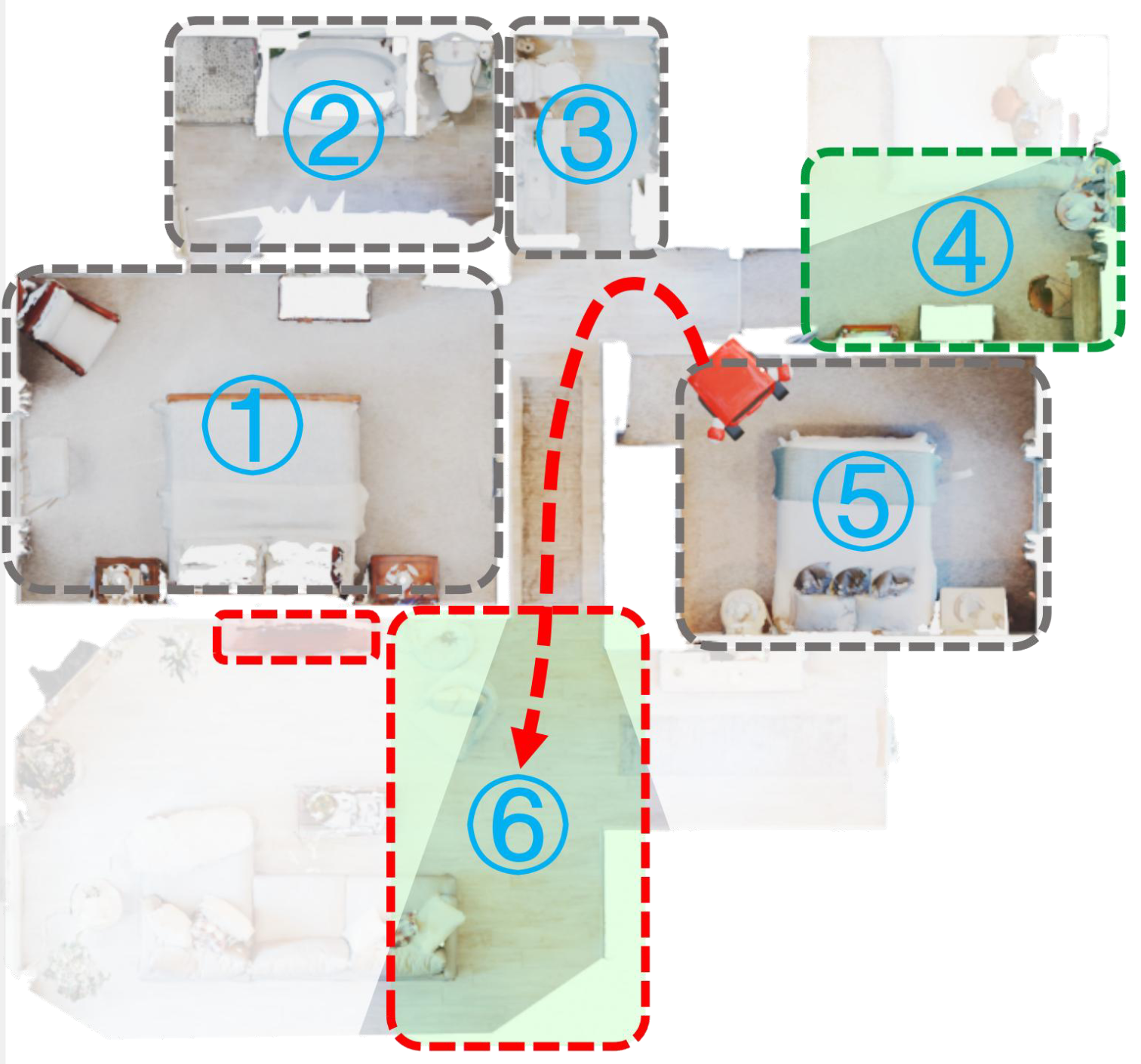
STRIVE: Structured Representation Integrating VLM Reasoning for Efficient Object Navigation
H. Zhu, Z. Li, Z. Liu, W. Wang, J. Zhang, J. Francis, J. Oh
43rd IEEE International Conference on Robotics & Automation (ICRA 2026) + RSS SemRob 2025
paper
website
|
|
|
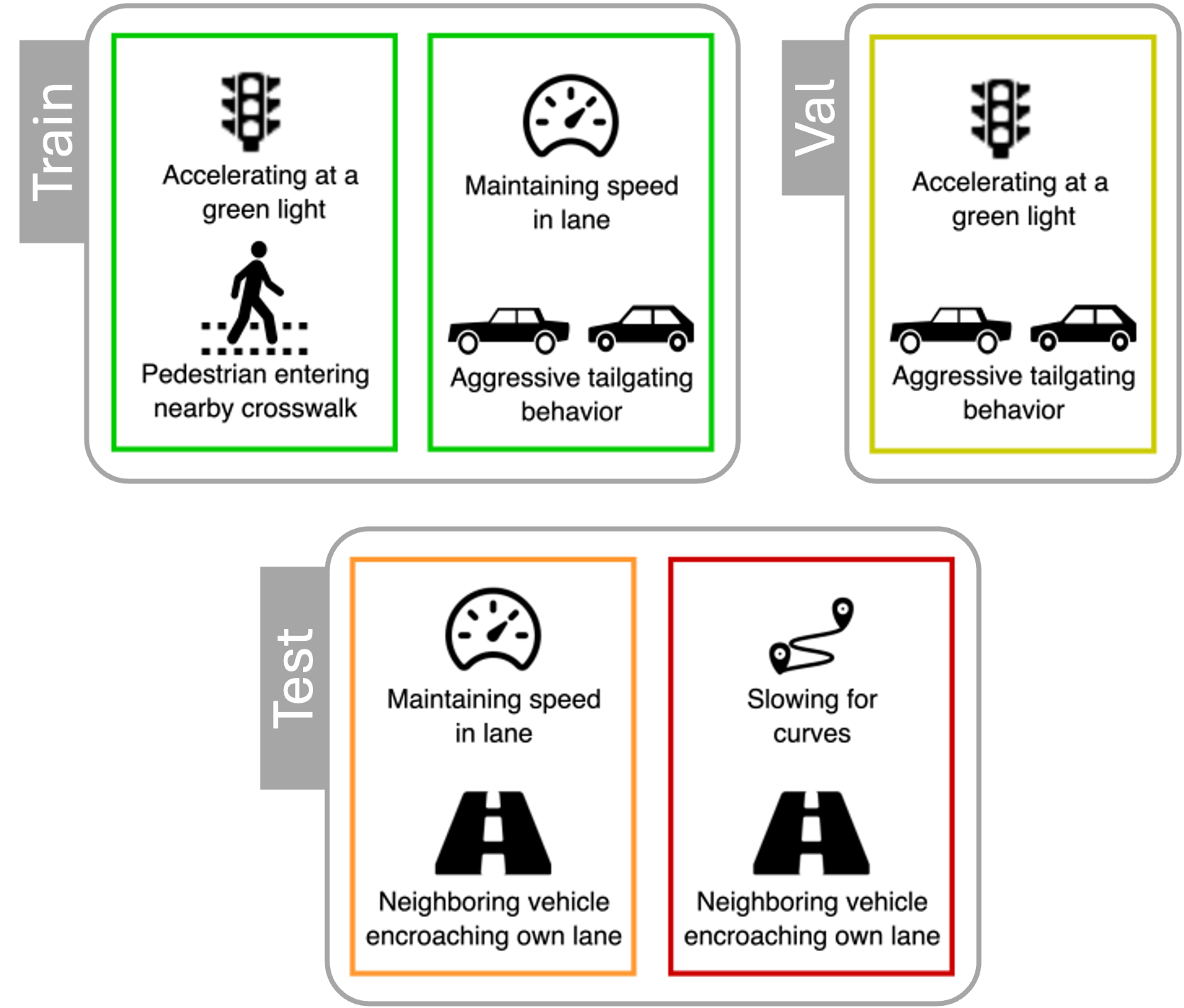
LongComp: Long-Tail Compositional Zero-Shot Generalization for Robust Trajectory Prediction
B Stoler, J Francis, J Oh
arXiv, 2025
paper
|
|
|
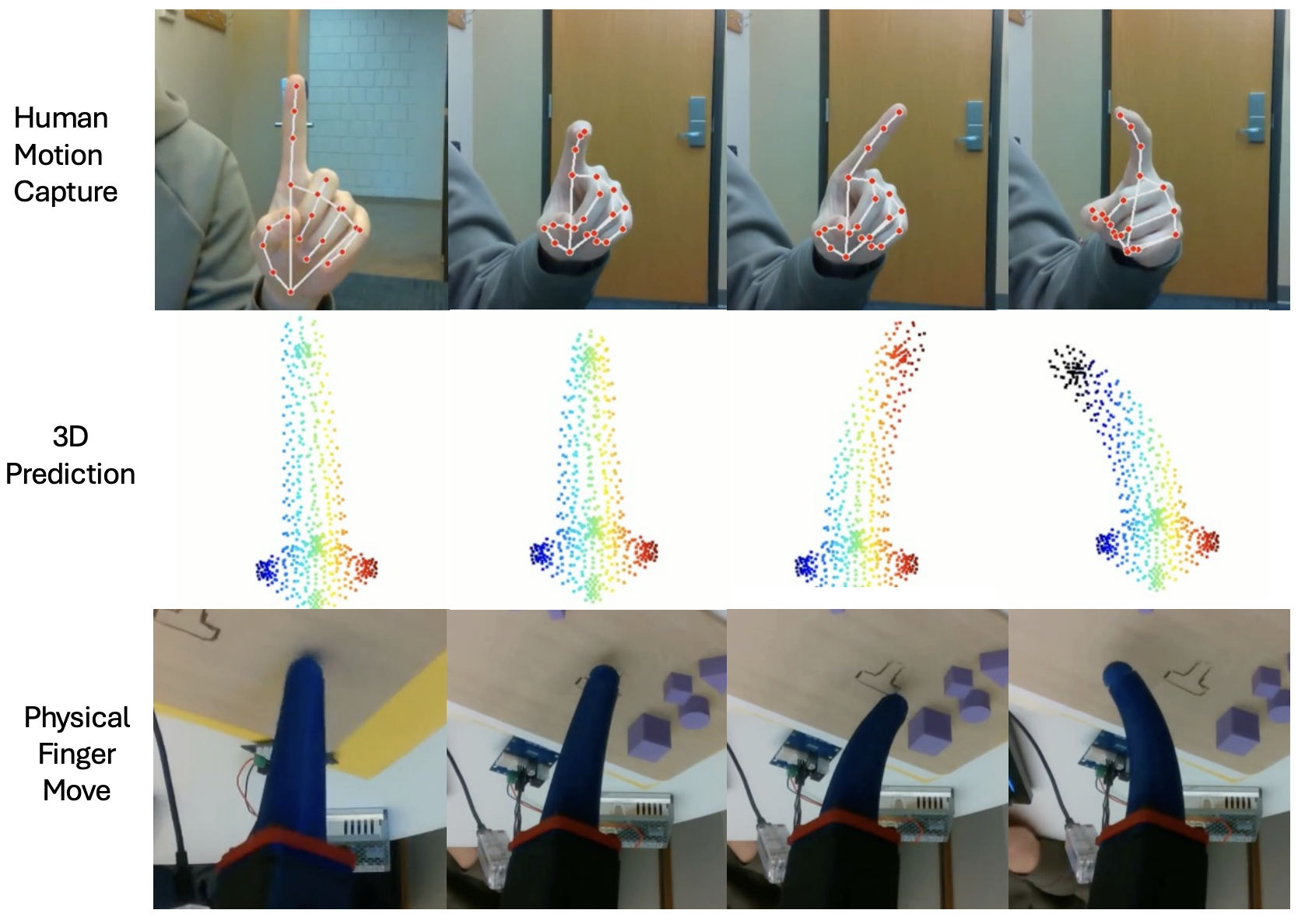
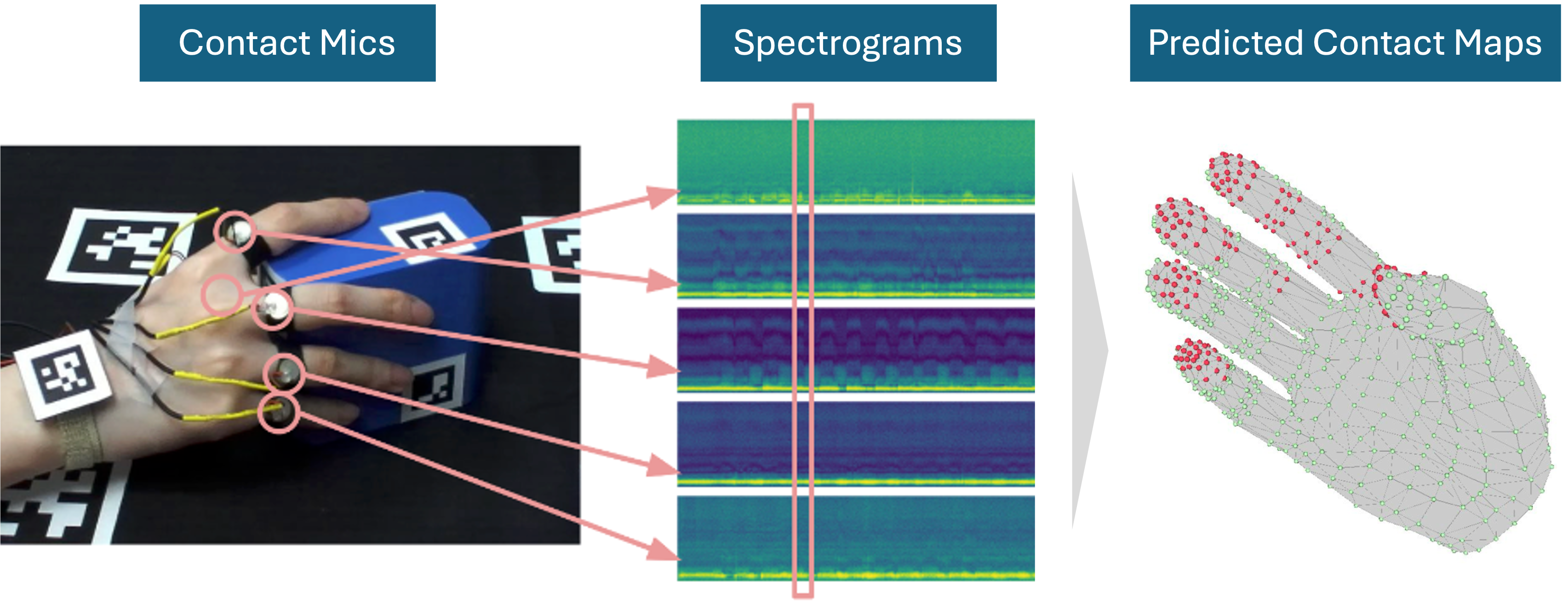
Visuo-Acoustic Hand Pose and Contact Estimation
Y. Mao*, U. Yoo*, Y Yao, S. N. Syed, L. Bondi, J. Francis, J. Oh, J. Ichnowski
arXiv, 2025
paper
website
|
|
|
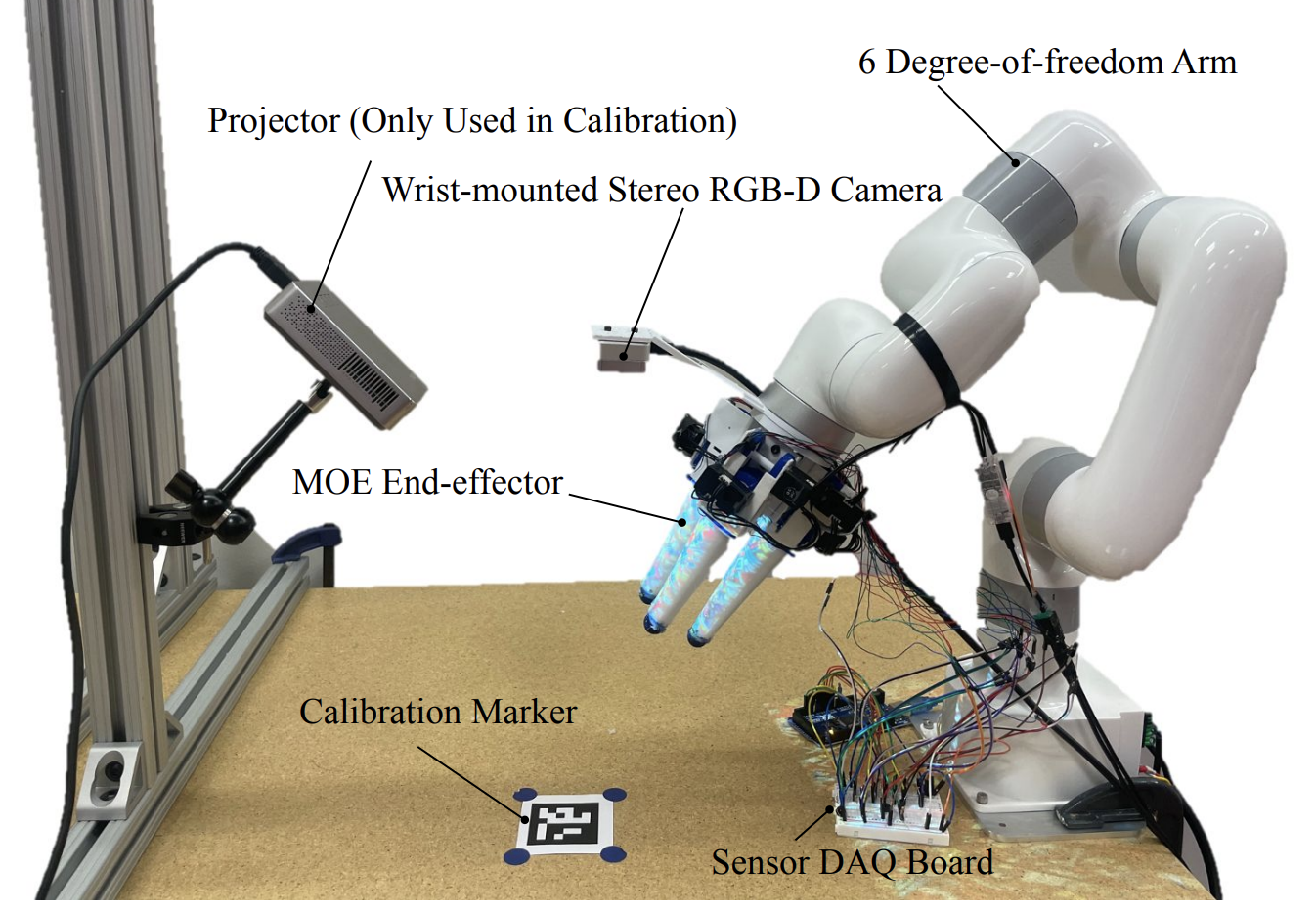
KineSoft: Learning Proprioceptive Manipulation Policies with Soft Robot Hands
U. Yoo, J. Francis, J. Oh, J. Ichnowski
9th Conference on Robot Learning (CoRL 2025) [Oral] + ICLR WRL 2025
paper
website
|
|
|
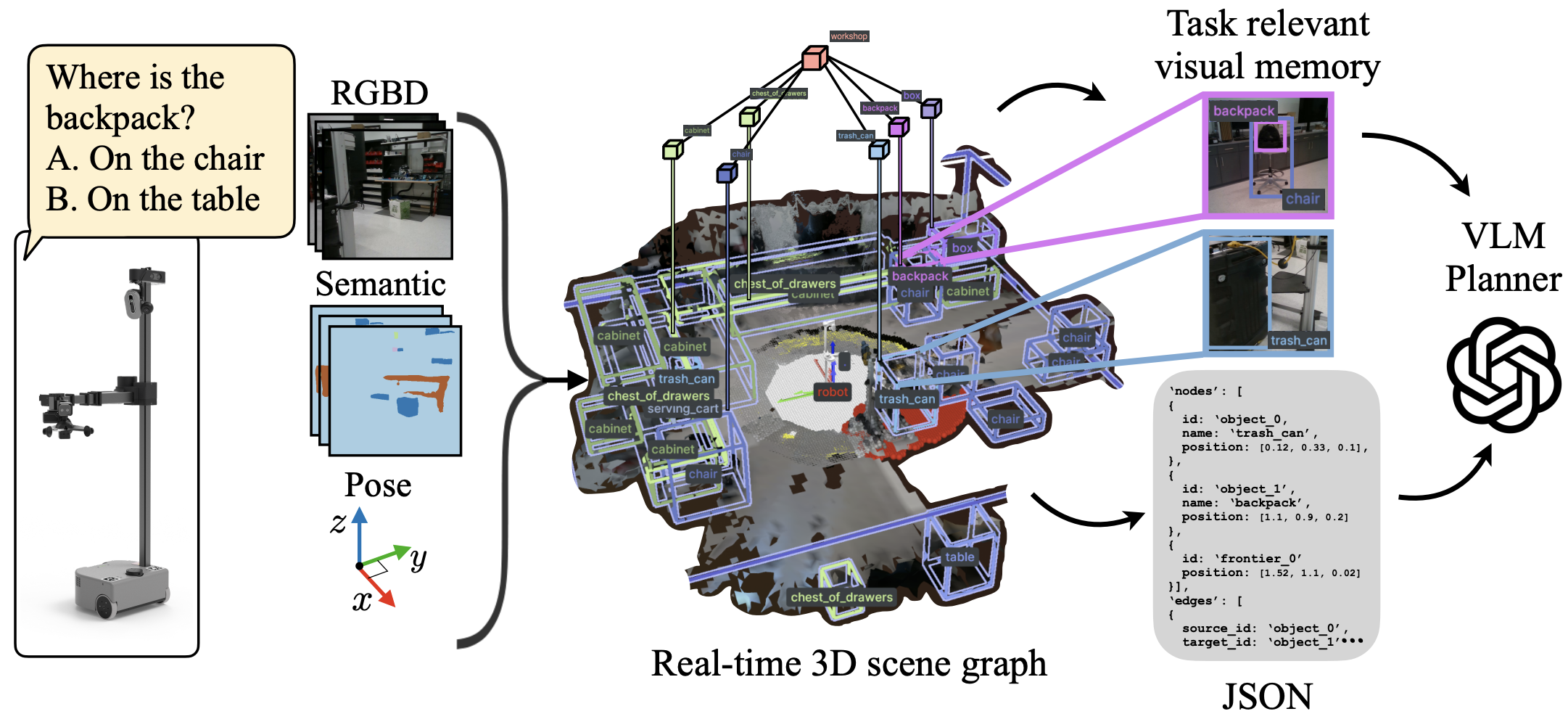
GraphEQA: Using 3D Semantic Scene Graphs for Real-time Embodied Question Answering
S. Saxena, B. Buchanan, C. Paxton, B. Chen, N. Vaskevicius, L. Palmieri, J. Francis, O. Kroemer
9th Conference on Robot Learning (CoRL 2025) + RSS SemRob 2025
paper
website
|
|
|
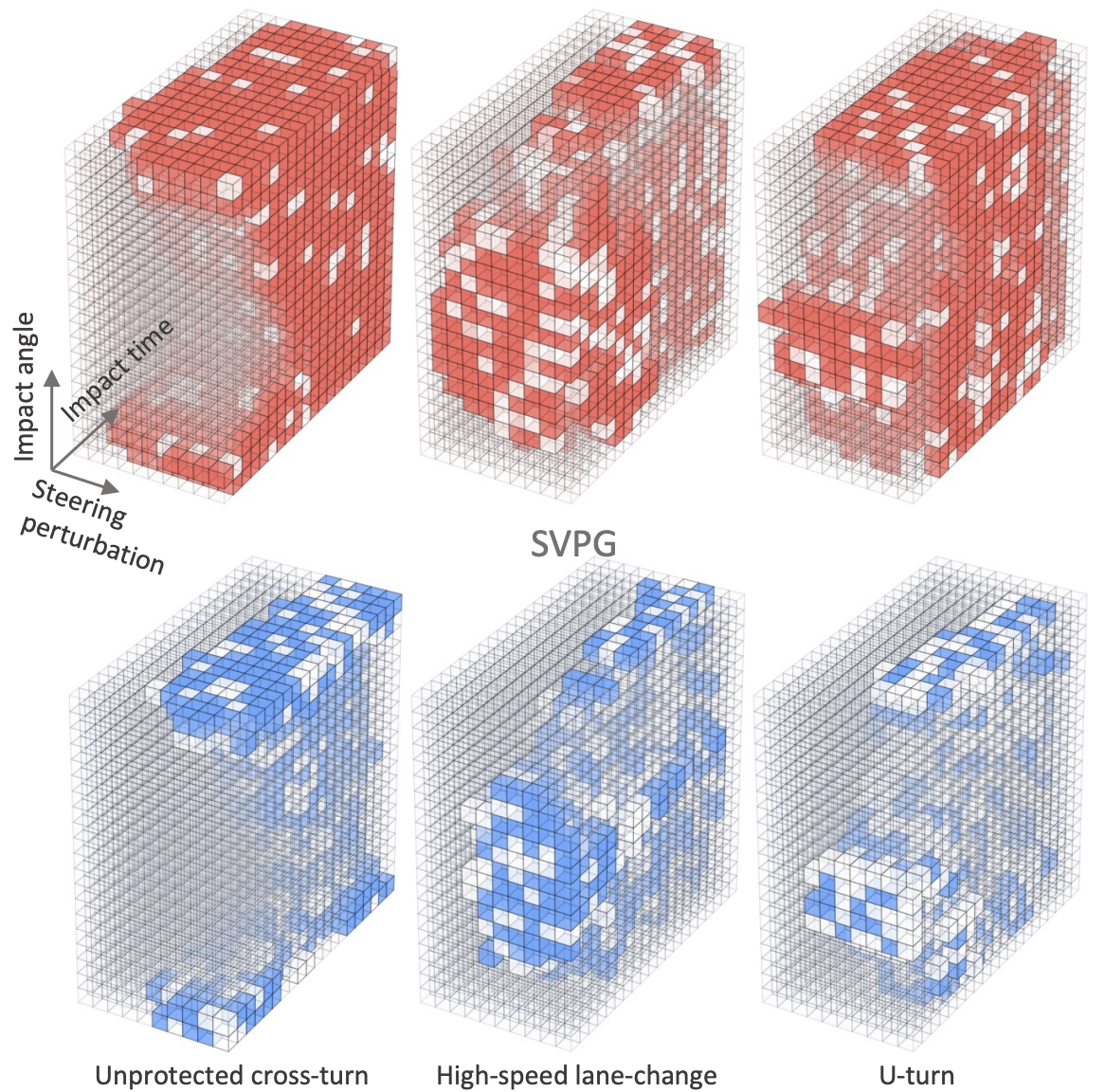
SEAL: Towards Safe Autonomous Driving via Skill-Enabled Adversary Learning for Closed-Loop Scenario Generation
B. Stoler, I. Navarro, J. Francis, J. Oh
IEEE Robotics and Automation Letters (RA-L, 2025) —> ICRA 2026
paper
code
|
|
|
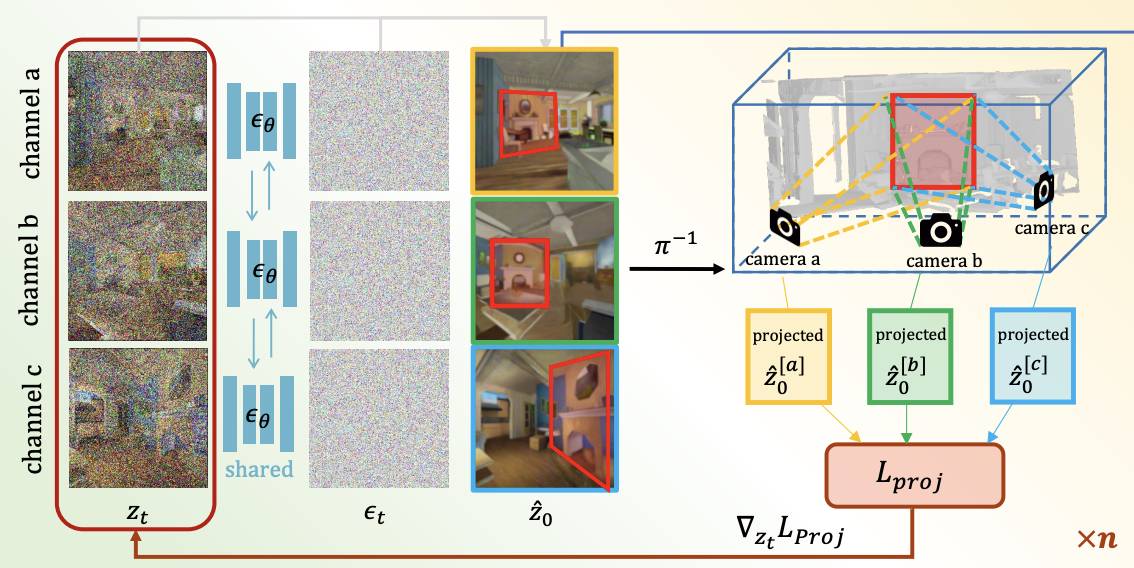
MOSAIC: Generating Consistent, Privacy-Preserving Scenes from Multiple Depth Views in Multi-Room Environments
Z. Liu, H. Zhu, R. Chen, J. Francis, S. Hwang, J. Zhang, J. Oh
20th International Conference on Computer Vision (ICCV 2025)
paper
website
|
|
|
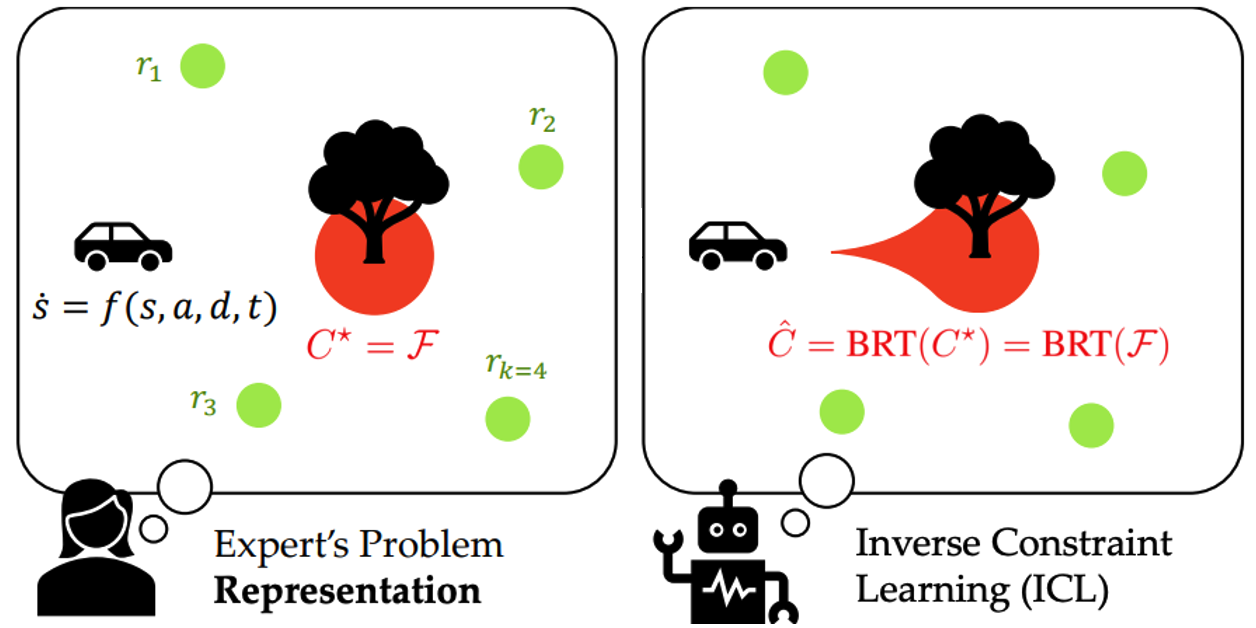
Your Learned Constraint is Secretly a Backward Reachable Tube
M. Qadri,
G. Swamy,
J. Francis,
M. Kaess,
A. Bajcsy
2nd Reinforcement Learning Conference (RLC 2025)
paper
|
|
|
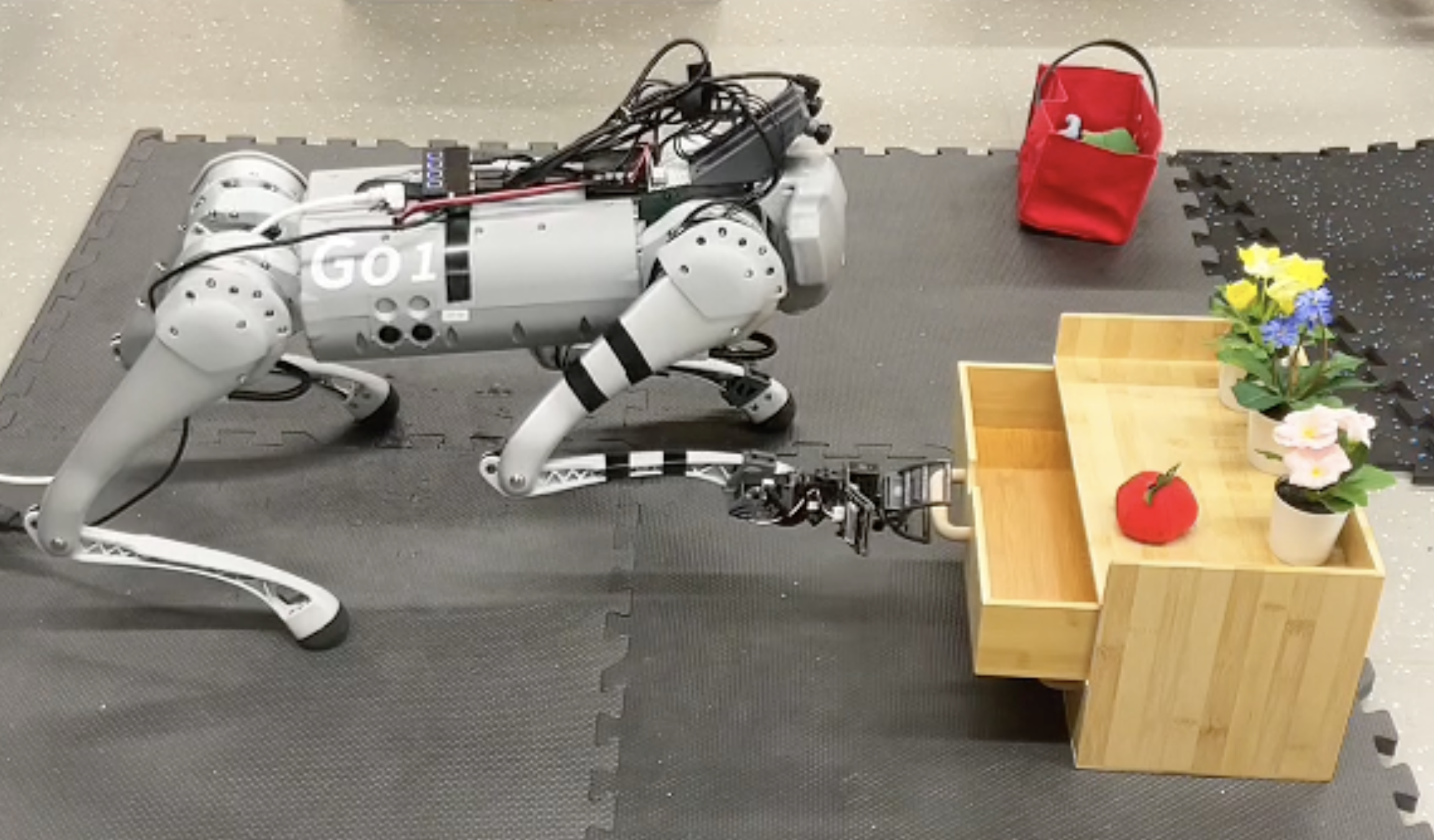
Human2LocoMan: Learning Versatile Quadrupedal Manipulation with Human Pre-Training
Y. Niu*, Y. Zhang*, M. Yu, C. Lin, C. Li, Y. Wang, Y. Yang, W. Yu, T. Zhang, B. Chen, J. Francis, Z. Li, J. Tan, D. Zhao
21st Robotics: Science and Systems (RSS 2025) + RSS EgoAct 2025
paper
website
|
|
|
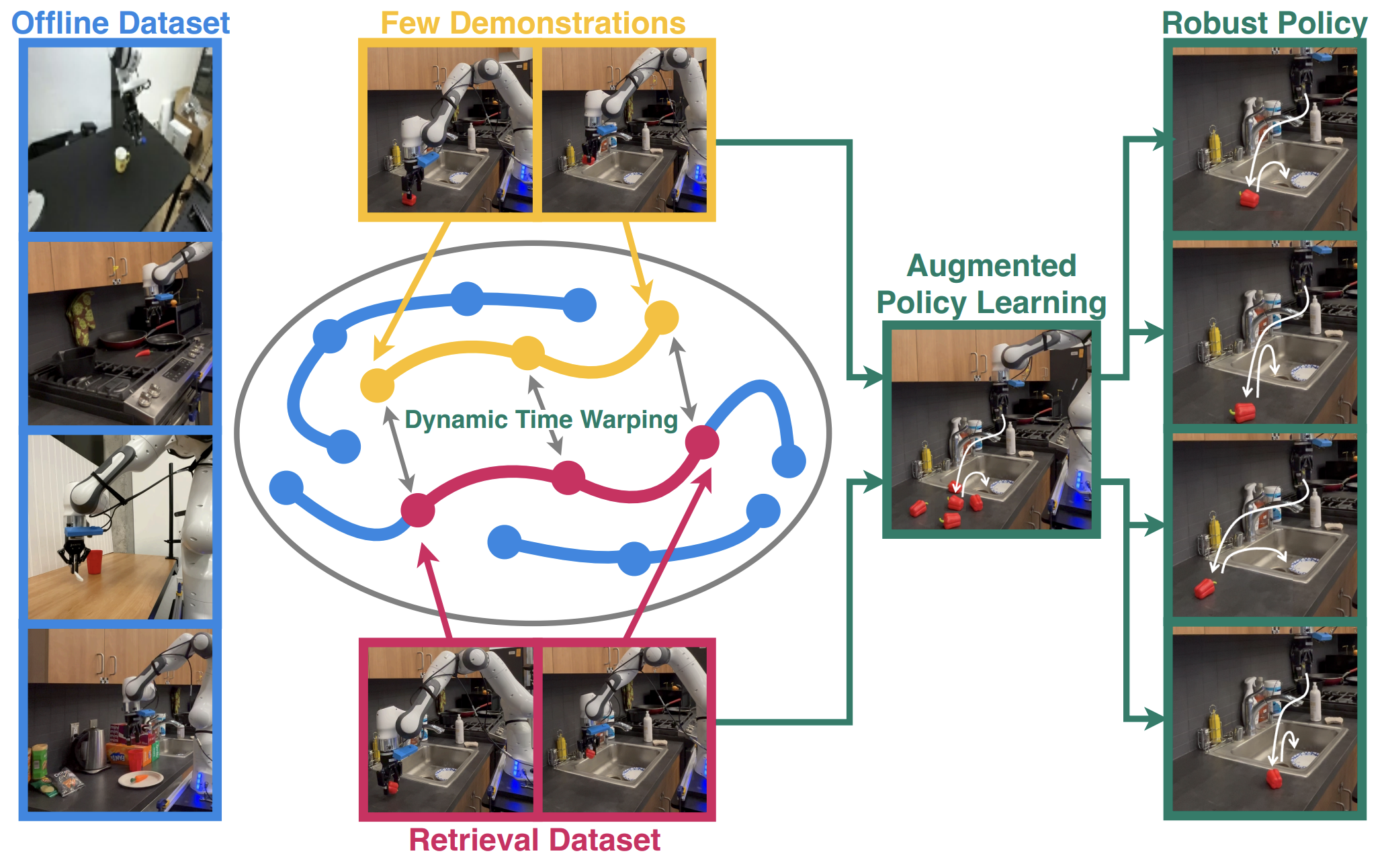
STRAP: Robot Sub-Trajectory Retrieval for Augmented Policy Learning
M. Memmel*,
J. Berg*,
B. Chen,
A. Gupta†,
J. Francis†
13th International Conference on Learning Representations (ICLR 2025) + CoRL X-Embodiment 2024
paper
arxiv
website
code
|
|
|
CaDRE: Controllable and Diverse Generation of Safety-Critical Driving Scenarios using Real-World Trajectories
P. Huang, W. Ding, B. Stoler, J. Francis, B. Chen, D. Zhao
42nd IEEE-RAS International Conference on Robotics and Automation (ICRA 2025)
paper
|
|
|
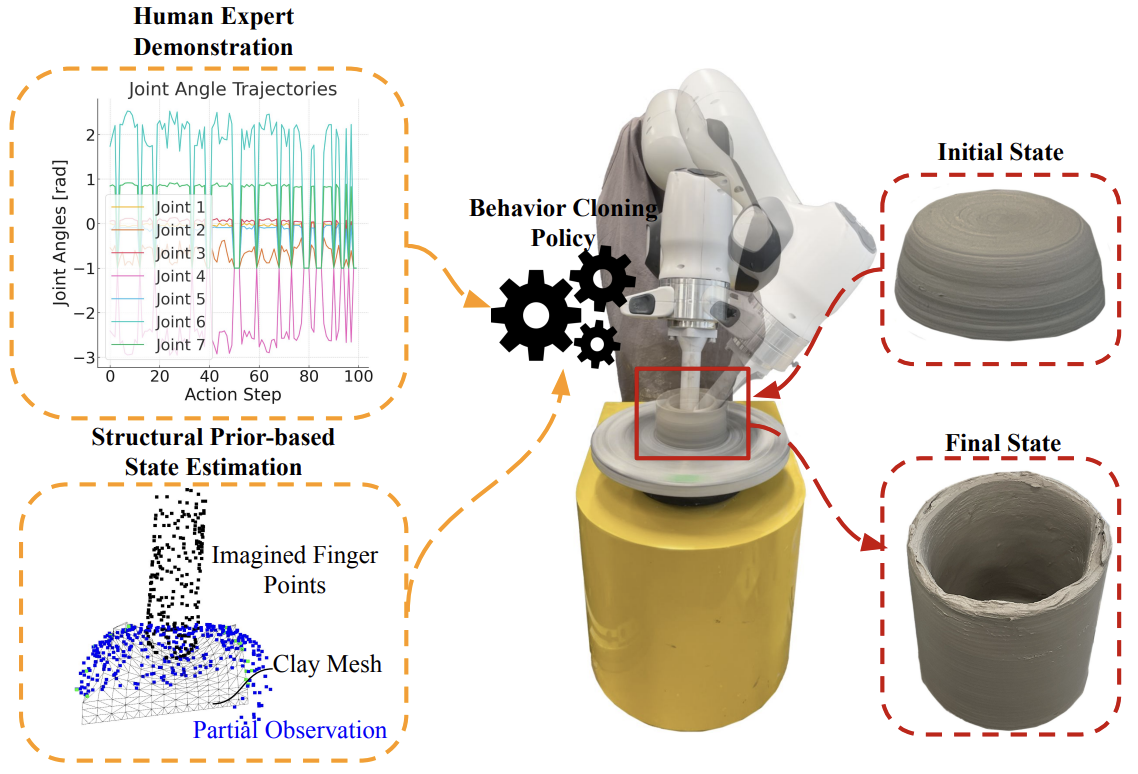
RoPotter: Toward Robotic Pottery and Deformable Object Manipulation with Structural Priors
U. Yoo, A. Hung, J. Francis, J. Oh, J. Ichnowski
23rd IEEE-RAS International Conference on Humanoid Robots (Humanoids 2024) ['Best Oral Finalist' award]
paper
arxiv
website
|
|
|
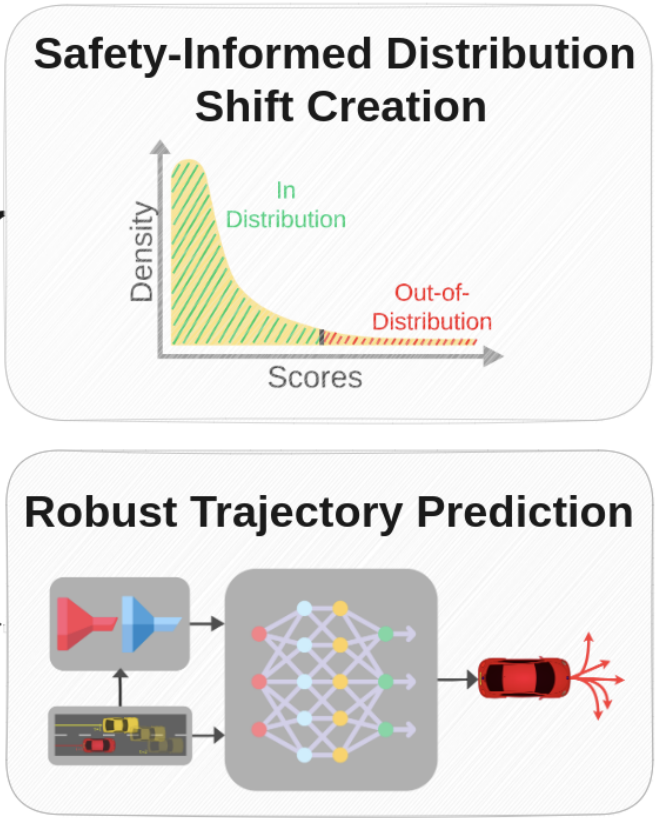
SafeShift: Safety-Informed Distribution Shifts for Robust Trajectory Prediction in Autonomous Driving
B. Stoler, I. Navarro, M. Jana, S. Hwang, J. Francis, J. Oh
35th IEEE-ITS Intelligent Vehicles (IV 2024)
paper
arxiv
code
|
|
|
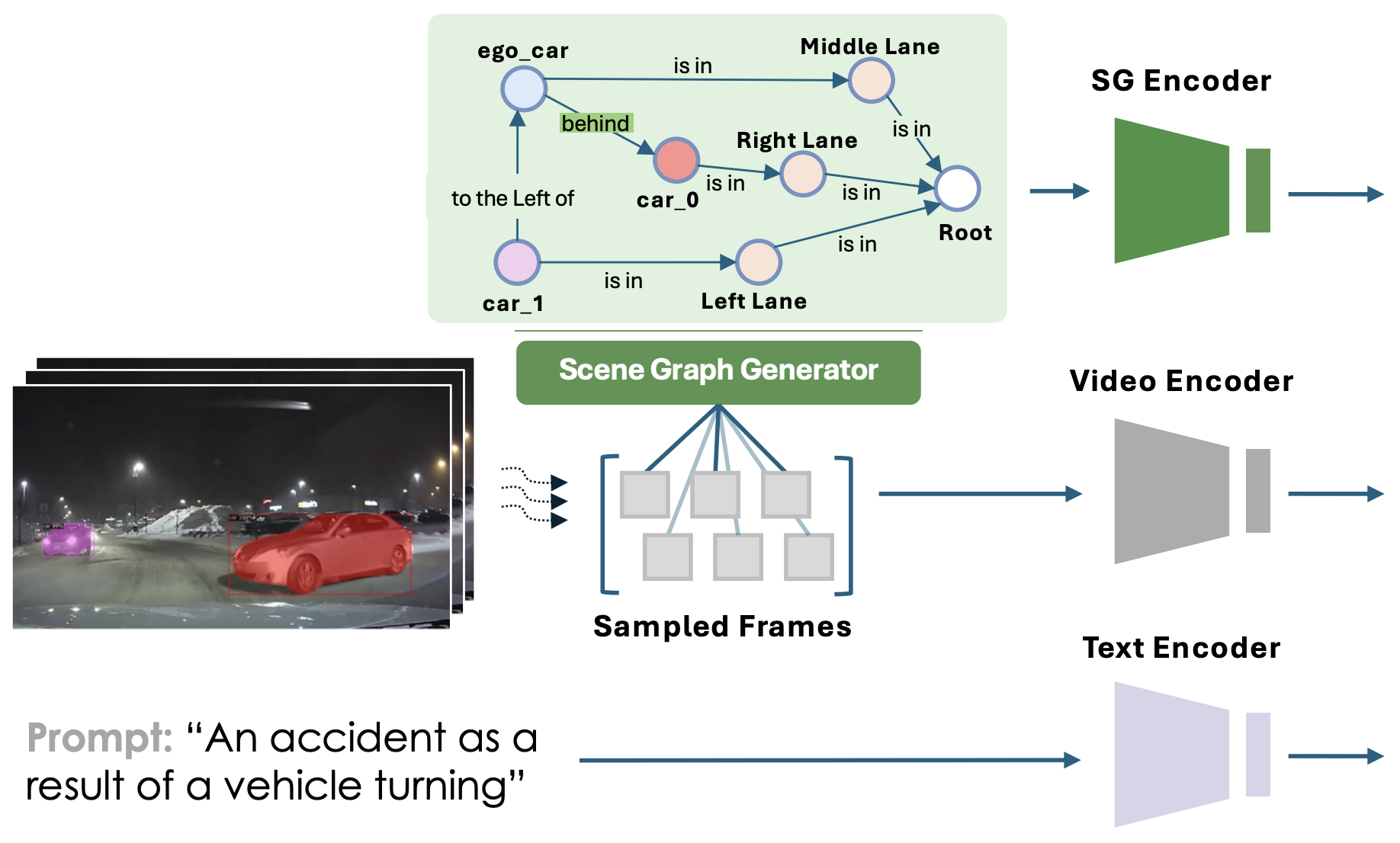
Enhancing Vision-Language Models with Scene Graphs for Traffic Accident Understanding
A. Lohner, F. Compagno, J. Francis, A. Oltramari
2nd IEEE International Automated Vehicle Validation Conference (IAVVC 2024) ['Best Paper Runner-up' award]
paper
arxiv
|
|
|
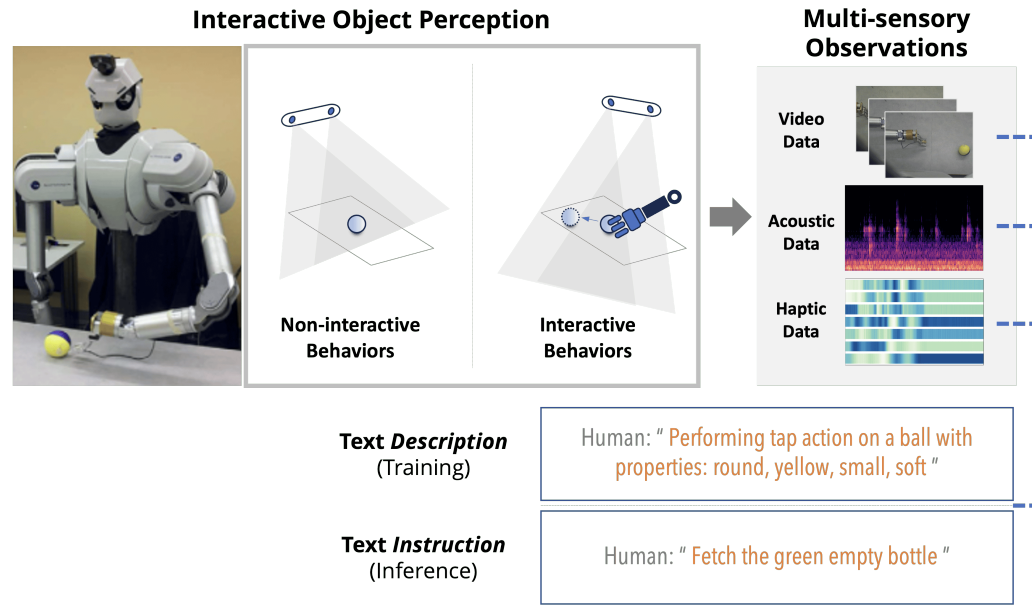
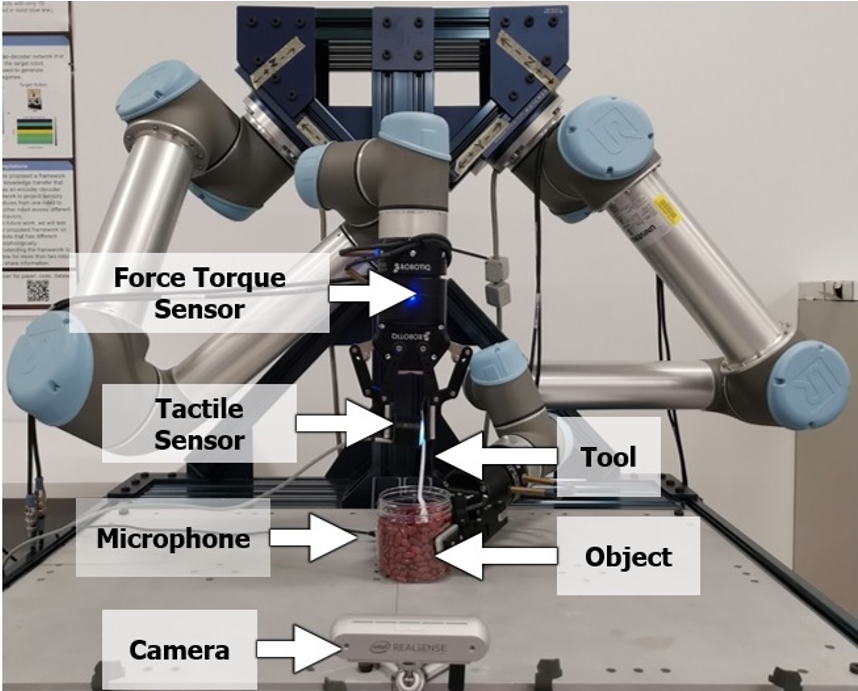
Learning Unified Multi-Sensory Object Property Representations for Robot Learning via Interactive Perception
G. Tatiya, J. Francis, H.-H. Wu, Y. Bisk, J. Sinapov
41st IEEE-RAS International Conference on Robotics and Automation (ICRA 2024)
paper
arxiv
code
|
|
|
Cross-Tool and Cross-Behavior Perceptual Knowledge Transfer for Grounded Object Recognition
G Tatiya, J Francis, J Sinapov
arXiv, 2024
paper
code
|
|
|
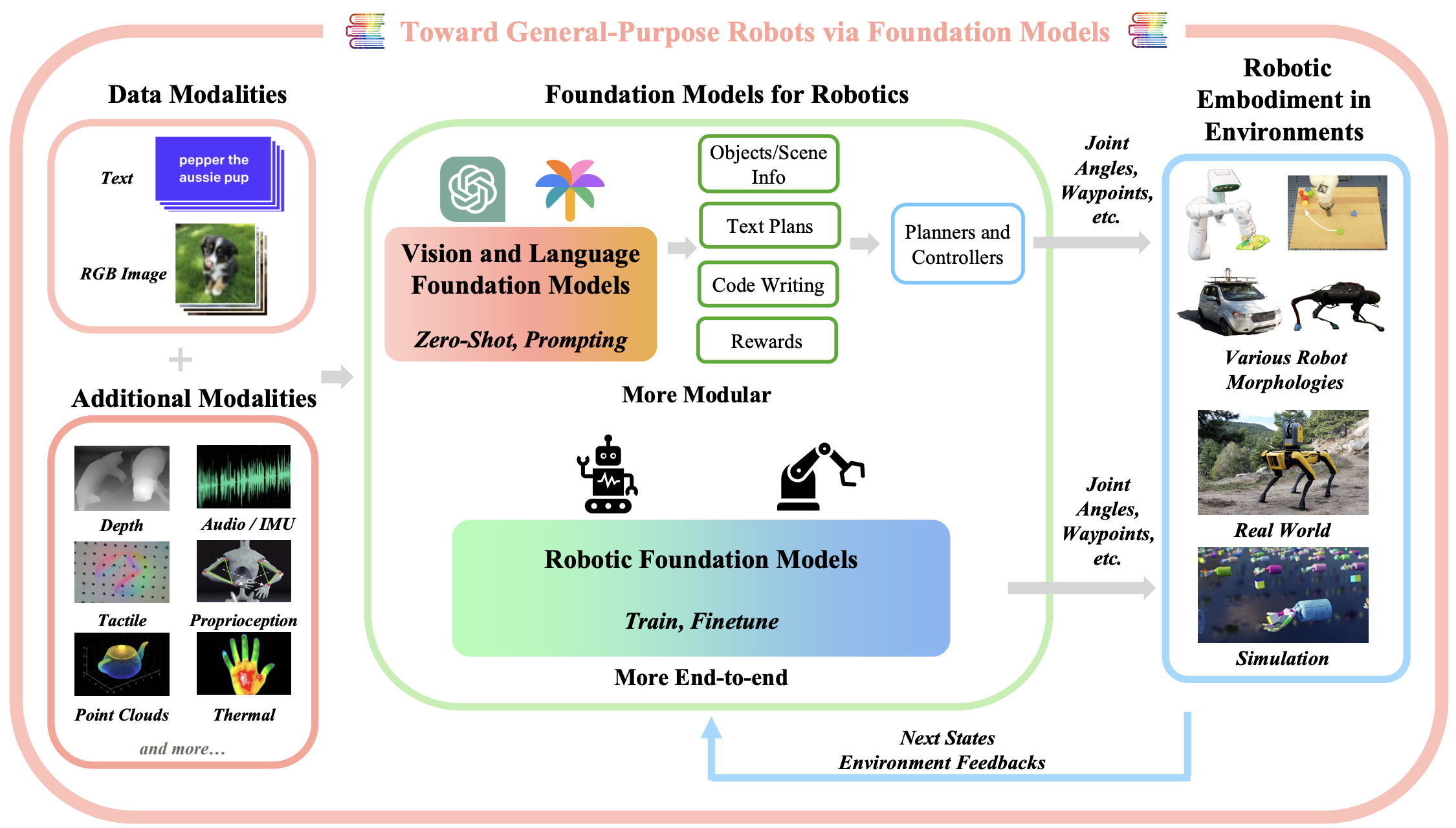
Toward general-purpose robots via foundation models: A survey and meta-analysis
Y. Hu*, Q. Xie*, V. Jain*, J. Francis, J. Patrikar, N. Keetha, S. Kim, Y. Xie, T. Zhang, H.-S. Fang, S. Zhao, S. Omidshafiei, D.-K. Kim, A.-a. Agha-mohammadi, K. Sycara, M. Johnson-Roberson, D. Batra, X. Wang, S. Scherer, C. Wang, Z. Kira, F. Xia, Y. Bisk
arXiv, 2023
paper
repo
|
|
|
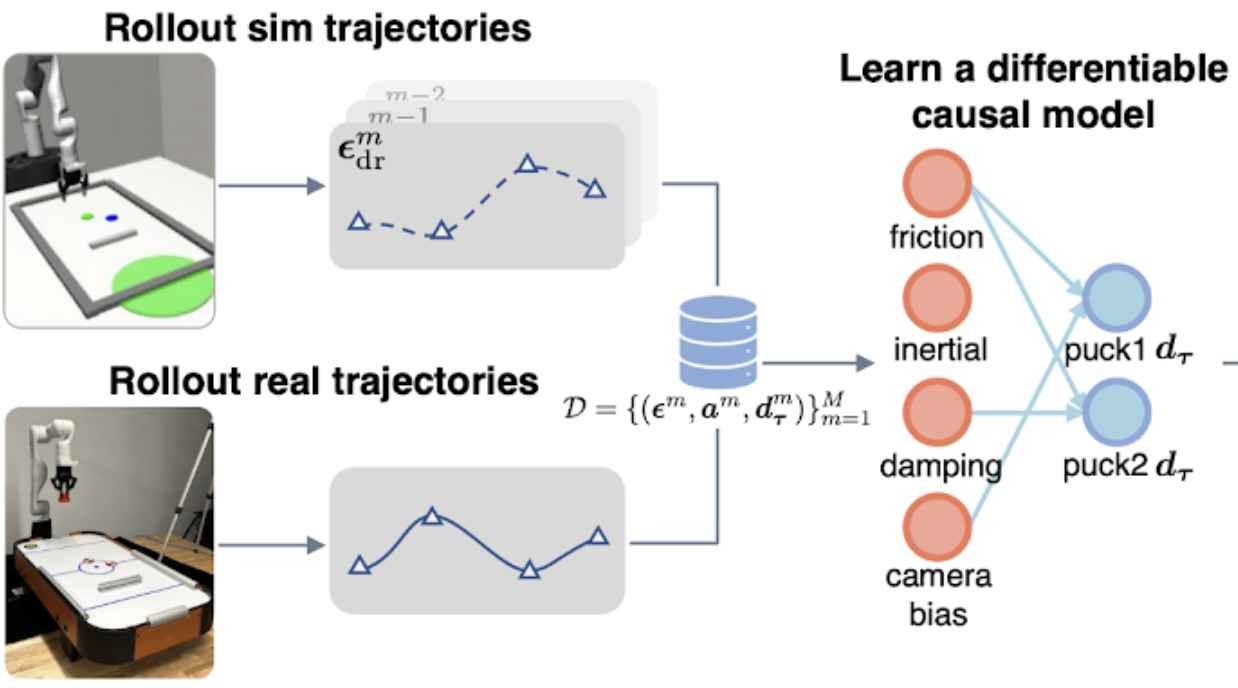
What Went Wrong? Closing the Sim-to-Real Gap via Differentiable Causal Discovery
P. Huang, X. Zhang, Z. Cao, S. Liu, M. Xu, W. Ding, J. Francis, B. Chen, D. Zhao
7th Conference on Robot Learning (CoRL 2023)
paper
arxiv
website
|
|
|
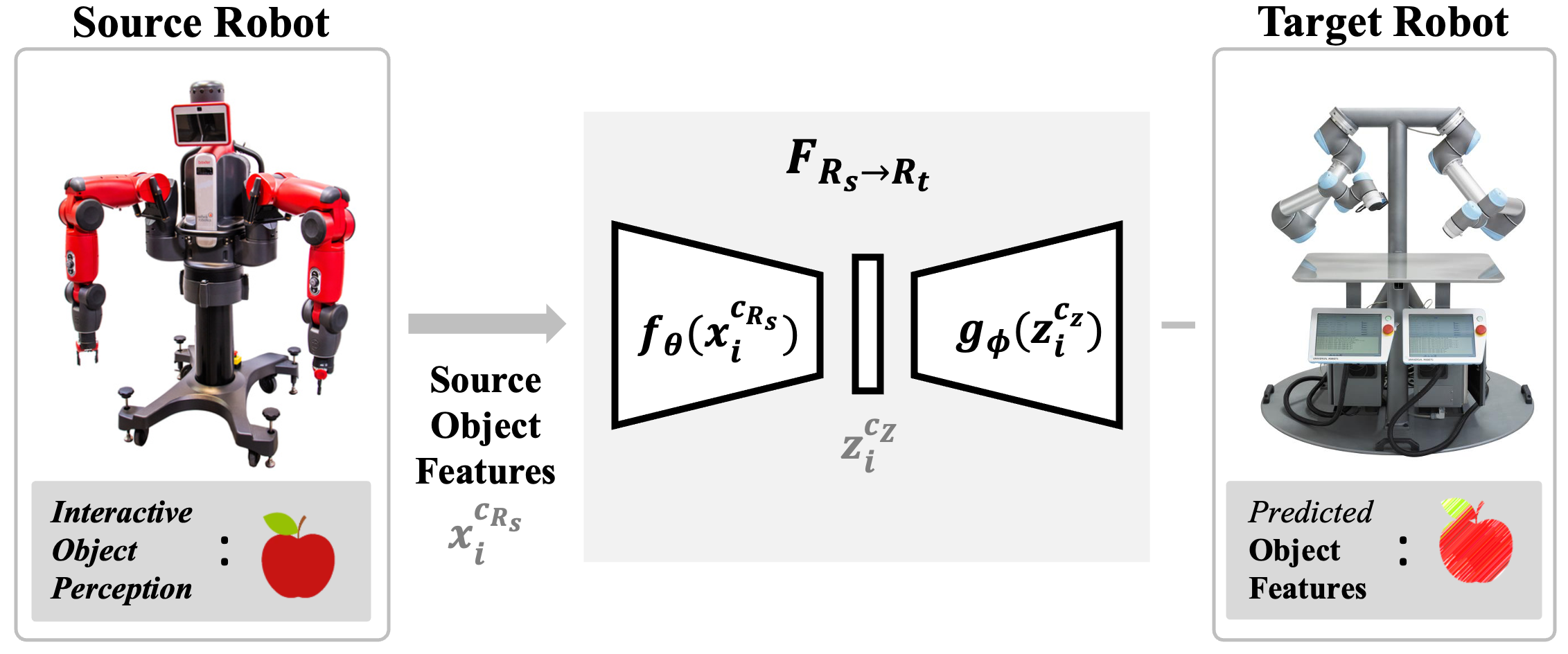
Transferring Implicit Knowledge of Non-Visual Object Properties Across Heterogeneous Robot Morphologies
G. Tatiya, J. Francis, J. Sinapov
40th IEEE-RAS International Conference on Robotics and Automation (ICRA 2023)
paper
arxiv
code
|
|
|
Core Challenges in Embodied Vision-Language Planning
J. Francis, N. Kitamura, F. Labelle, X. Lu, I. Navarro, J. Oh
Journal of Artificial Intelligence Research (JAIR 2022)
paper
arxiv
|
|
|
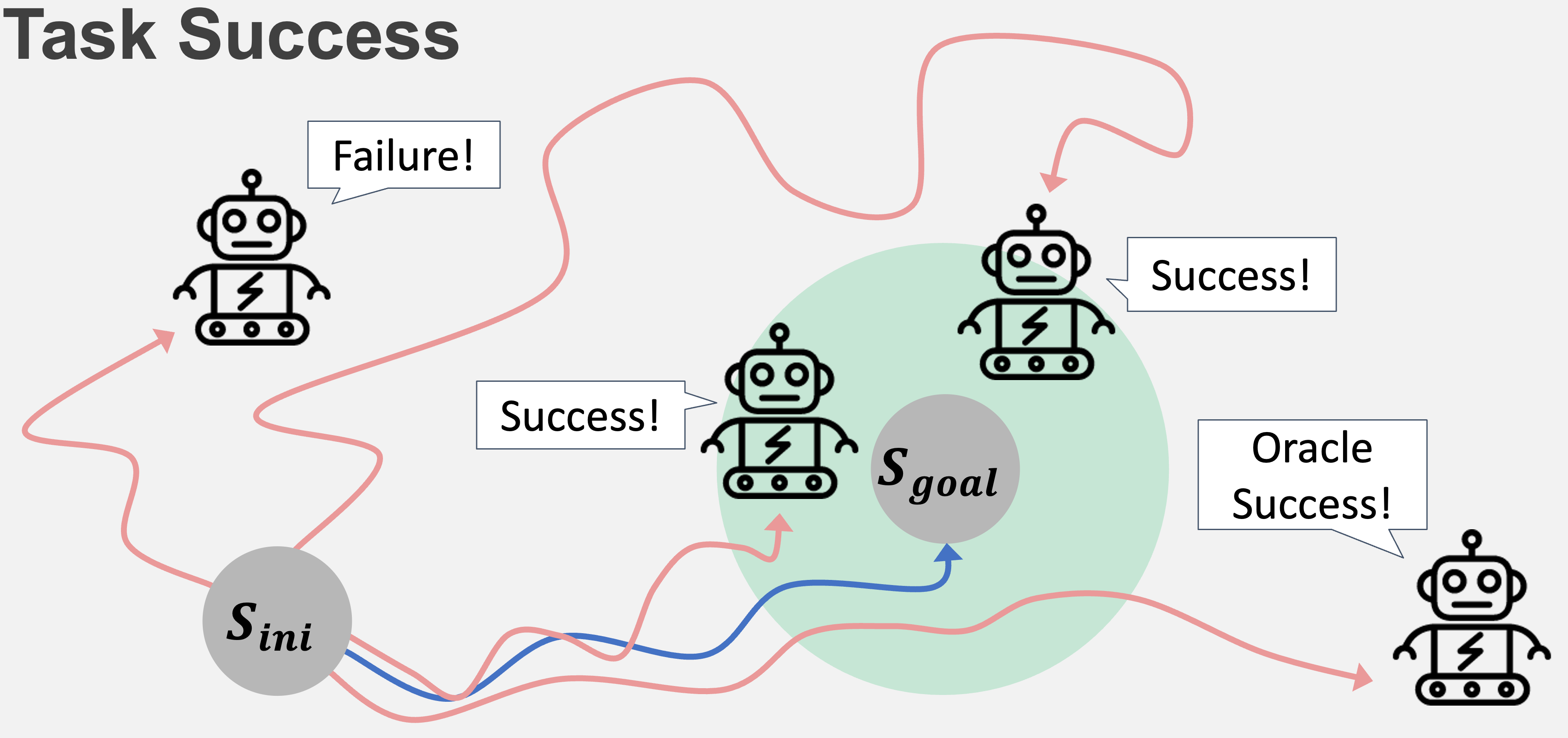
Learn-to-Race: A Multimodal Control Environment for Autonomous Racing
J. Herman*, J. Francis*, S. Ganju, B. Chen, A. Koul, A. Gupta, A. Skabelkin, I. Zhukov, M. Kumskoy, E. Nyberg
16th IEEE/CVF International Conference on Computer Vision (ICCV 2021)
paper
arxiv
website
code
|
|
|
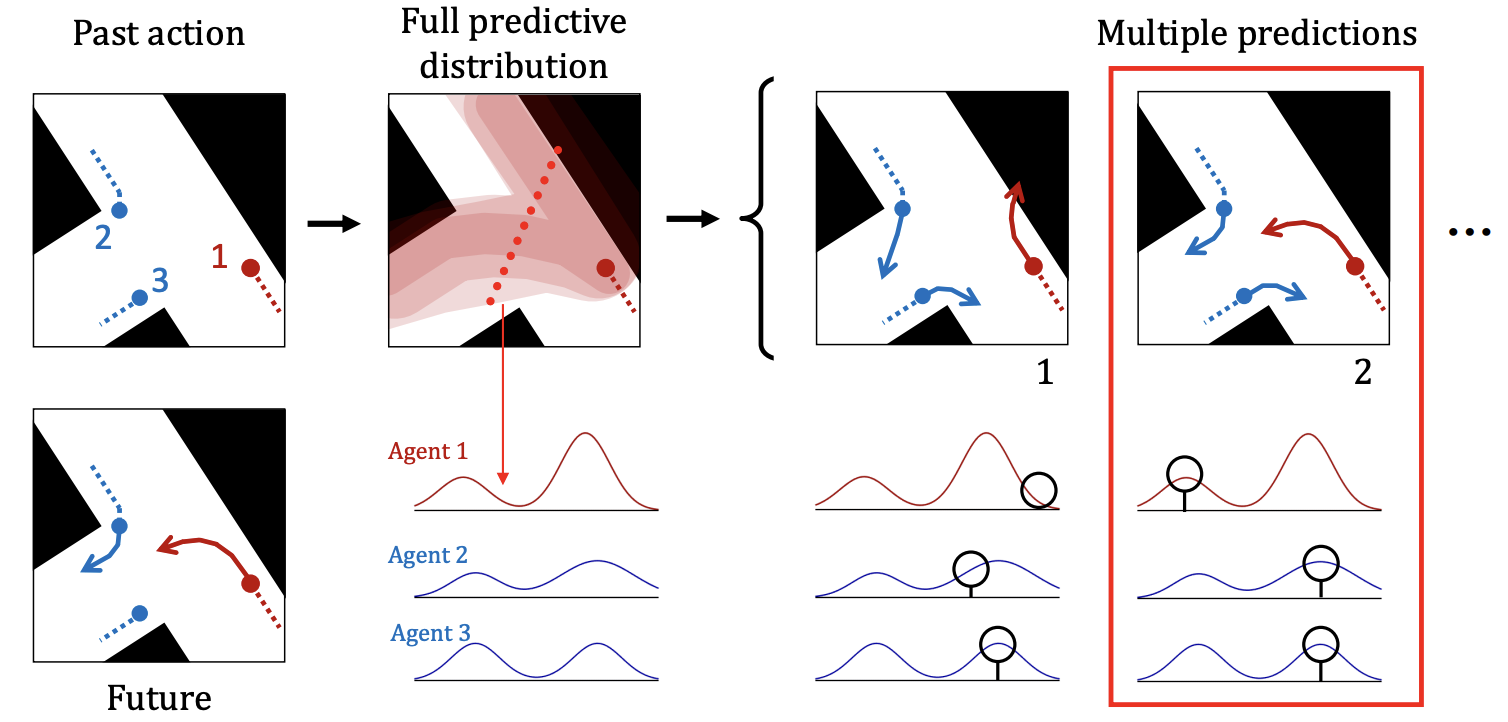
Diverse and Admissible Trajectory Forecasting through Multimodal Context Understanding
S. H. Park, G. Lee, M. Bhat, J. Seo, M. Kang, J. Francis, A. R. Jadhav, P. P. Liang, L.-P. Morency
16th CVF European Conference on Computer Vision (ECCV 2020)
paper
arxiv
code
|
|